
P-Seminar "Robotik"
Präsentation der Arbeiten
Im Fokus von Christian Götz, Leiter des Studien-Service-Centers des Departments Informatik der Universität Erlangen-Nürnberg hat das P-Seminar im September 2011 seine Arbeiten dem "neuen" Seminar 11/13 vorgestellt. Fünf Gruppen zeigten ihre Ergebnisse: Ob Kran-, Polar- oder Lagerroboter, aus allen Lebensbereichen konnten Anwendungsbeispiele vorgestellt werden.
Pfadfinder-Roboter
Unsere Gruppe bestand aus Alice Limmer, Jonathan Mang und Daniel Ahlborn. Wir hatten uns als Ziel gesetzt, einen Roboter zu bauen, der selbstständig zu einem festgelegten Punkt im Raum fährt, selbst wenn Hindernisse auf seinem Weg liegen. Leider mussten wir aus zeit- und sensorentechnischen Gründen unsere Anforderungen etwas senken. Am Ende konnte der Roboter zwar nicht zu einem gegebenen Punkt, wohl aber in eine gegebene Richtung fahren und dabei Hindernissen ausweichen. Video ansehen ... popup: yes
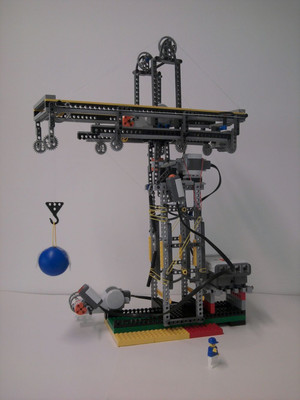
Kran-Roboter
Unsere Gruppe bestand aus Michael Armbruster und Johannes Klier. Das Ziel, dass wir uns gesetzt haben war es, einen Roboter zu entwickeln, der Lasten bewegen kann. Zudem sollte er auch noch Gegenstände erkennen und sortieren können. Wir benutzen insgesamt drei Motoren und einen Farbscannern.
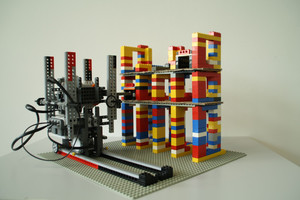
Lager-Roboter
Unserer Gruppe, bestehend aus Phillip Kuhrt, Florian Scharf und Jannik Wrede, gelang es durch einer koordinierte Zusammenarbeit insbesondere die anfänglichen Stabilitätsprobleme unseres Lagerregalroboters zu lösen. Grundsätzliches Ziel war der Bau eines Roboters, der Kisten zwischen verschiedenen Fächern eines Lagerregals hin und her bewegen soll. Am Ende funktionierte der Roboter, wenn in den Lagerfächern ausreichend Platz war, einwandfrei.
Plotter

Unser Roboter ist im Allgemeinen ein ganz normaler Plotter, der allerdings nicht mit x-, und y-Koordinaten rechnet, sondern einen Arm im Halbkreis bewegt auf dem ein im Radius variierbarer Stift befestigt ist. Er ist über ein USB-Kabel mit einen PC verbunden, auf dem ein weiteres Programm läuft. Dieses stellt eine weiße Fläche dar, auf die mit einem Gamepad gezeichnet werden kann. Der gezeichnete Pfad wird simultan in Polarkoordinaten umgerechnet und dem Roboter übermittelt. Video ansehen ... popup: yes

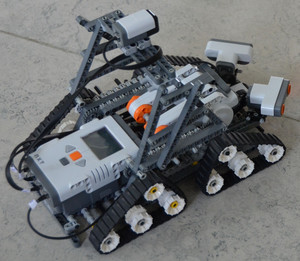
Modernes Auto
Unser Team besteht aus Tobias Fischer, Maximilian Ackermann und Julian Reck. Wir hatten die Idee, einen Roboter zu entwickeln, der einem modernen Auto möglichst nahe kommt. So wollten wir neben mechanischen Elementen wie Differential und Getriebe auch sensorische Sicherheitssysteme einbauen. Der anfängliche Plan den Roboter über ein Smartphone anzusteuern, funktionierte zwar. Allerdings mit der Einschränkung, dass nur ein Motor gleichzeitig angesteuert werden konnte. Deshalb programmierten wir den Roboter so, dass er autonom Hindernissen ausweichen kann. Video ansehen ... popup: yes